Introduction of Coordinate System
- It is one of the basic and mathematical concepts to locate or identify the object’s position in space.
Definition of Coordinate System
- A coordinate system is a mathematical system used to determine or describe the position or location of an object or point in space.
- A coordinate system provides a way to uniquely identify the position of an object in terms of numerical coordinates.
Features of Coordinate System
- The coordinate system is a reference system used to represent a point in space by one or more numbers or symbols, called coordinates.
- A coordinate system typically involves a set of axes and a reference point, which together enable the description of the position of an object in terms of numerical coordinates.
Types of Coordinate System
- There are so many different types of coordinate systems that exist and are used in various fields, such as the Cartesian or Rectangular coordinate system, Polar coordinate system, Cylindrical coordinate system, Spherical coordinate system, and many others. Each coordinate system has its own set of rules and conventions for representing points in space.
- But, broadly two major types of coordinate systems are widely used. These are –
(I) 2-D/Cartesian Coordinate System:
-
- In a two-dimensional(2-D) coordinate system, also known as a Cartesian coordinate system.
- In a two-dimensional coordinate system, the reference point is usually called the origin and the axes are typically labeled x and y.
- The point where the two axes intersect is called the origin, and it is assigned the coordinates (0, 0).
- In this system, each point in the plane can be uniquely identified by two coordinates usually denoted by a pair of numerical values (x, y), where x represents the horizontal position of the point or distance along the x-axis and y represents the vertical position of the point or distance along the y-axis.
- In a 2-D coordinate system, the X axis generally points from left to right, and the Y axis generally points from bottom to top.
(II) 3-D Coordinate System:
-
- In a three-dimensional(3-D) coordinate system, a point is identified by three coordinates, usually denoted as (x, y, z), where x represents the horizontal position of the point, y represents its vertical position, and z represents its position along the depth axis.
- In a three-dimensional coordinate system, a third axis, usually labeled z, is added.
-
To represent a 3-D system, we have a choice as to whether the Z-axis points into the screen or out of the screen. On this basis, a 3-D system can be:-
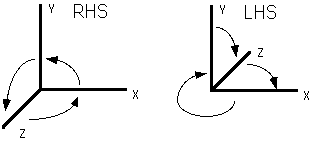
(a) Right Hand 3-D Coordinate System (RHS):
-
-
-
In the RHS system, the Z axis is coming out of the page.
-
In the RHS system, the Counterclockwise or Anticlockwise rotations are positive-
-
-
if we rotate about the X axis : the rotation Y->Z is positive
if we rotate about the Y axis : the rotation Z->X is positive
if we rotate about the Z axis : the rotation X->Y is positive
(b) Left-Hand 3-D Coordinate System (LHS):
-
-
- In the LHS system, Z is going into the page.
-
In the LHS system, Clockwise rotations are positive.
-
if we rotate about the X axis : the rotation Y->Z is positive
if we rotate about the Y axis : the rotation Z->X is positive
if we rotate about the Z axis : the rotation X->Y is positive
Homogenous Coordinates
- Homogeneous coordinates are a mathematical concept and specific coordinates used in computer graphics, computer vision, and other fields to represent geometric objects, points, and transformations in higher-dimensional space. Thus, Homogeneous coordinates are a powerful tool for representing and manipulating geometric objects and transformations in higher-dimensional space.
- In homogeneous coordinates, a point in n-dimensional space is represented as an (n+1)-tuple, where the additional coordinate is usually called the “homogeneous coordinate“. The homogeneous coordinate is typically set to 1 for points, while vectors have a homogeneous coordinate of 0.
- Homogeneous coordinates are usually represented as a tuple of four numbers (x, y, z, w), where (x, y, z) are the Cartesian coordinates of a point or vector in 3D space, and w is a scaling factor that is typically set to 1.0 for points and 0.0 for vectors.
- The use of homogeneous coordinates allows for transformations such as translation, rotation, scaling, and perspective projection to be represented by matrix multiplication. This makes it easier to perform these transformations in a single step, without the need for multiple operations. This makes it possible to perform many geometric operations using linear algebra, which is computationally efficient.
- Homogeneous coordinates also make it possible to represent points at infinity and to unify points and vectors, which can simplify many algorithms and computations in computer graphics and computer vision.
- Homogeneous coordinates are generally used in the design and construction of applications. Here we perform translations, rotations, and scaling to fit the picture into the proper position.
Use/Application of Coordinate System
- Coordinate systems are used extensively in many areas of mathematics, physics, engineering, and many other fields to describe and analyze the positions of objects in space, to plot graphs and curves, and to solve equations and problems involving geometry and trigonometry.
- It is also used in computer graphics and visualization to represent objects and scenes in three-dimensional space.
![]()
0 Comments